



- Apa itu Line Follower Robot?
Pengertian Robot

Kata robot yang, berasal dari bahasa Czech, robota, yang berarti pekerja, mulai menjadi populer ketika seorang penulis berbangsa Czech (Ceko), Karl Capek, membuat pertunjukan dari lakon komedi yang ditulisnya pada tahun 1921 yang berjudul RUR(Rossum’s Universal Robot) [1]. Robot dapat diartikan sebagai sebuah mesin yang dapat bekerja secara terus menerus baik secara otomatis maupun terkendali. Robot digunakan untuk membantu tugas-tugas manusia mengerjakan hal yang kadang sulit atau tidak bisa dilakukan manusia secara langsung. Misalnya untuk menangani material radio aktif, merakit mobil dalam industri perakitan mobil, menjelajah planet mars, sebagai media pertahanan atau perang, dan sebagainya. Pada dasarnya dilihat dari struktur dan fungsi fisiknya (pendekatan visual) robot terdiri dari dua bagian, yaitu non-mobile robot dan mobile robot. Kombinasi keduanya menghasilkan kelompok konvensional (mobile dan non-mobile)contohnya mobile manipulator, walking robot,dll dan non-konvensional (humanoid, animaloid, extraordinary). Saat ini robot selain untuk membantu pekerjaan manusia juga digunakan sebagai hiburan.
Pengertian Line Follower Robot (LFR)
Line Follower Robot (Robot Pengikut Garis) adalah robot yang dapat berjalan mengikuti sebuah lintasan, ada yang menyebutnya dengan Line Tracker, Line Tracer Robot dan sebagainya. Garis yang dimaksud adalah garis berwarna hitam diatas permukaan berwarna putih atau sebaliknya, ada juga lintasan dengan warna lain dengan permukaan yang kontras dengan warna garisnya. Ada juga garis yang tak terlihat yang digunakan sebagai lintasan robot, misalnya medan magnet.

Bagaimana bisa mengikuti garis
Seperti layaknya manusia, bagaimana manusia dapat berjalan pada mengikuti jalan yang ada tanpa menabrak dan sebagainya, tentunya karena manusia memiliki “mata” sebagai penginderanya. Begitu juga robot line follower ini, dia memiliki sensor garis yang berfungsi seperti “mata” pada manusia.
Sensor garis ini mendeteksi adanya garis atau tidak pada permukaan lintasan robot tersebut, dan informasi yang diterima sensor garis kemudian diteruskan ke prosesor untuk diolah sedemikian rupa dan akhirnya hasil informasi hasil olahannya akan diteruskan ke penggerak atau motor agar motor dapat menyesuaikan gerak tubuh robot sesuai garis yang dideteksinya.
Pada konstruksi yang sederhana, robot line follower memiliki dua sensor garis (A-Kiri dan B-Kanan), yang terhubung ke dua motor (kanan dan kiri) secara bersilang melalui sebuah prosesor/driver (lihat gambar). Sensor garis A (Kiri) mengendalikan motor kanan, sedangkan sensor garis B (kanan) mengendalikan motor kiri.

- Ketika sensor A mendeteksi garis sedangkan sensor B keluar garis ini berarti posisi robot berada lebih sebelah kanan dari garis, untuk itu motor kanan akan aktif sedangkan motor kiri akan mati. Akibatnya motor akan berbelok kearah kiri.
- Begitu sebaliknya ketika sensor B mendeteksi garis, motor kiri aktif dan motor kanan mati, maka robot akan berbelok ke kanan.
- Jika kedua sensor mendeteksi garis maka kedua motor akan aktif dan robot akan bergerak maju.

2. Mari Merangkai Rangkaian Elektroniknya
Untuk menrangkai rangkaian elektroniknya kita perlu tahu dulu diagram blok sistem yang akan kita bangun, dengan demikian akan menjadi mudah mengerjakannya. Blok sistem yang akan kita bagun paling tidak tampak seperti gambar berikut. Sistemnya terdiri dari sensor garis, rangkaian komparator, minimum sistem ATMega8 dan Driver motor.

Sensor garis
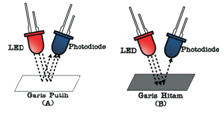
Apa itu sensor garis? Yang dimaksud sensor garis disini adalah suatu perangkat/alat yang digunakan untuk mendeteksi adanya sebuah garis atau tidak. Garis yang dimaksud adalah garis berwarna hitam diatas permukaan berwarna putih. Alat ini menggunakan teknik pantulan cahaya inframerah yang ditangkap oleh photodiode dari sebuah LED merah.

Rangkaian Komparator

Rangkaian komparator berfungsi sebagai signal conditioning, artinya bahwa sinyal atau tegangan yang dihasilkan oleh sensor garis akan dikondisikan ke level yang sesuai yang sesuai yang dapat diterima oleh mikrokontroler sebagai logika”0″dan”1″atau sekitar 0-3V(logika”0″) dan 3-5V (logika”1″).
Komparator sesuai namanya berfungsi untuk membandingkan 2 input tegangan pada opamp dan akan menghasilkan output berupa tegangan logika 0 dan 5V. Dua tegangan tersebut kita ambil yang pertama dari keluaran rangkaian sensor garis, dan sebagai pembanding sekaligus tegangan referensinya kita hasilkan melalui potensiometer yang dihubungkan keVcc.
Minimum Sistem ATMega8
 Rangkaian ini berfungsi sebagai pemroses sinyal dari sensor dan menghasilkan sinyal kontrol ke rangkaian driver motor.Rangkaiannya terdiri dari mikrokontrolerATMega8,dan komponen lain sebagai pendukung agar mikrokontroler dapat bekerja (secara hardware). Rangkaian pendukung tersebut antara lain, rangkaian reset, clock, dan ISP plug untuk memprogram IC. Semuanya terangkai menjadi satu yang disebut sebagai rangkaianminimumsystemATMega8.
Rangkaian ini berfungsi sebagai pemroses sinyal dari sensor dan menghasilkan sinyal kontrol ke rangkaian driver motor.Rangkaiannya terdiri dari mikrokontrolerATMega8,dan komponen lain sebagai pendukung agar mikrokontroler dapat bekerja (secara hardware). Rangkaian pendukung tersebut antara lain, rangkaian reset, clock, dan ISP plug untuk memprogram IC. Semuanya terangkai menjadi satu yang disebut sebagai rangkaianminimumsystemATMega8.Driver Motor
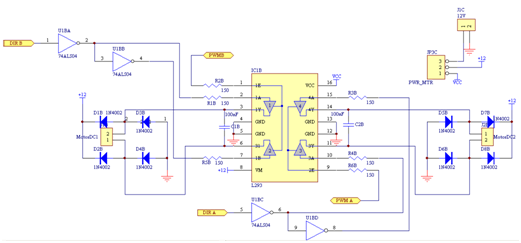
Driver motor yang kita bangun menggunakan konfigurasi jembatan H (H-Bridge),yang akan mengendalikan motor ke dua arah, searah jarumjam dan berlawanan arah jarumjam.Secara konsep rangkaian ini terdiri dari 4 saklar yang tersusun sedemikian rupasehingga memungkinkan motor dapat teraliri arus dengan arah yang berkebalikan. Seperti yang dijelaskan pada bab sebelumnya,pemberian polaritas tegangan pada terminal motor akan mempengaruhi arah arus yang melewati motor,dengan demikian motor akan berputar sesuai dengan arah arusnya.
Untuk lebih cepat dan mudah anda bisa gunakan kit ROBOARD8 V1.0.
3. Mari Merangkai Mekanik Robot
Mekanik/badan robot yang akan kita buat akan tampak seperti gambar dibawah ini. Bahan yang digunakan cukup mudah didapat di toko bangunan dekat rumah kita. Prosesnyapun tidak sesulit yang dibayangkan.

0 komentar:
Posting Komentar